
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Straipsnis, skirtas suprasti skirtumą tarp žingsninių variklių ir servo ir servo variklių
I. Žingsninių variklių ir servo ir servo variklių skirtumai
Žingsninis variklis: yra elektrinio impulso signalas į atviro ciklo valdymo elemento žingsninio variklio dalių kampinį poslinkį arba linijos poslinkį. Paprasčiau tariant, jis remiasi elektros impulso signalu, kad valdytų kampą ir apsisukimų skaičių. Taigi jis pasikliauja tik impulso signalu, kad nustatytų, kiek sukimosi. Kadangi jutiklio nėra, stabdymo kampas gali skirtis. Tačiau tikslus impulso signalas sumažina nuokrypį.
Servo variklis: pasikliaukite servo valdymo grandine, kad valdytumėte variklio greitį, per jutiklį, kad valdytumėte sukimosi padėtį. Taigi padėties valdymas yra labai tikslus. Ir sukimosi greitis taip pat kinta.
Servo (elektroninis servo): pagrindinis servo komponentas yra servo variklis. Jame yra servo variklio valdymo grandinė + reduktoriaus komplektas. O taip, servo variklyje nėra reduktoriaus komplekto. Ir servo turi reduktoriaus komplektą.
Ribinio servo atveju jis remiasi potenciometru po išėjimo velenu, kad nustatytų vairo svirties vairo kampą. Servo signalo valdymas yra impulsinio pločio moduliuotas (PWM) signalas, kai mikrovaldiklis gali lengvai generuoti šį signalą.
II. Pagrindinis žingsninio variklio principas
Kaip tai veikia:
Paprastai variklio rotorius yra nuolatinis magnetas, o kai srovė teka per statoriaus apvijas, statoriaus apvijos sukuria vektorinį magnetinį lauką. Šis magnetinis laukas privers rotorių pasisukti kampu, kad rotoriaus magnetinių laukų poros kryptis būtų tokia pati kaip statoriaus magnetinio lauko kryptis. Kai vektorinis statoriaus magnetinis laukas sukasi kampu. Su šiuo magnetiniu lauku rotorius taip pat sukasi kampu. Kiekvienam įvesties elektros impulsui variklis sukasi vienu kampiniu žingsniu į priekį. Jo išėjimo kampinis poslinkis yra proporcingas įvesties impulsų skaičiui, o sukimosi greitis yra proporcingas impulsų dažniui. Pakeitus apvijų įjungimo tvarką, variklis apsisuka. Todėl impulsų skaičių ir dažnį bei kiekvienos variklio fazės apvijų įjungimo tvarką galima valdyti, kad būtų galima valdyti žingsninio variklio sukimąsi.
Šilumos generavimo principas:
Paprastai matyti visų rūšių varikliai, vidiniai yra geležies šerdis ir apvijos ritė. Apvijos varža, galia sukels nuostolius, nuostolių dydis ir atsparumas, o srovė yra proporcinga kvadratui, kuri dažnai vadinama vario nuostoliais, jei srovė nėra standartinė nuolatinė arba sinusinė banga, taip pat sukels harmoninius nuostolius; šerdis turi histerezės sūkurinės srovės efektą, kintamajame magnetiniame lauke taip pat bus nuostolių, susijusių su medžiagos dydžiu, srove, dažniu, įtampa, o tai vadinama geležies praradimu. Vario ir geležies nuostoliai pasireikš šilumos susidarymo forma, taip paveikdami variklio efektyvumą. Žingsniniai varikliai paprastai siekia padėties nustatymo tikslumo ir sukimo momento, efektyvumas yra palyginti mažas, srovė paprastai yra didesnė, o harmoniniai komponentai yra dideli, srovės dažnis kinta su greičiu ir kaita, todėl žingsniniai varikliai paprastai turi šilumos situaciją, o situacija yra rimtesnė nei bendras kintamosios srovės variklis.
III. Vairo konstrukcija
Servo daugiausia susideda iš korpuso, plokštės, pavaros variklio, reduktoriaus ir padėties nustatymo elemento. Jo veikimo principas yra tas, kad imtuvas siunčia signalą į servo, o plokštės IC varo bešerdį variklį, kad jis pradėtų suktis, o galia per reduktorių perduodama sukamajai svirties, o tuo pačiu metu padėties detektorius siunčia signalą atgal, kad nustatytų, ar jis atvyko į padėties nustatymą, ar ne. Padėties detektorius iš tikrųjų yra kintamasis rezistorius. Kai servo sukasi, rezistoriaus vertė atitinkamai pasikeis, o sukimosi kampą galima sužinoti aptikus rezistoriaus vertę. Bendrasis servo variklis yra plona varinė viela, apvyniota aplink trijų polių rotorių, kai srovė teka per ritę, sukuria magnetinį lauką, o rotoriaus magneto periferija sukuria atstūmimą, o tai savo ruožtu sukuria sukimosi jėgą. Pagal fiziką objekto inercijos momentas yra tiesiogiai proporcingas jo masei, todėl kuo didesnė pasukamo objekto masė, tuo didesnės jėgos reikia. Siekiant greito sukimosi greičio ir mažo energijos suvartojimo, servo yra pagamintas iš plonų varinių laidų, susuktų į labai ploną tuščiavidurį cilindrą, suformuojant labai lengvą tuščiavidurį rotorių be polių, o cilindro, kuris yra tuščiavidurio puodelio variklis, viduje yra įtaisyti magnetai.
Kad tiktų skirtingoms darbo aplinkoms, yra vandeniui ir dulkėms atsparios konstrukcijos servosai; ir atsižvelgiant į skirtingus apkrovos reikalavimus, yra plastikinės ir metalinės servo pavaros, o metalinės servo pavaros paprastai yra didelio sukimo momento ir didelės spartos, o jų pranašumas yra tai, kad krumpliaračiai nebus susmulkinti dėl per didelių apkrovų. Aukštesnės klasės servosistemos bus aprūpintos rutuliniais guoliais, kad sukimasis būtų greitesnis ir tikslesnis. Yra skirtumas tarp vieno rutulinio ir dviejų rutulinių guolių, žinoma, kad du rutuliniai guoliai yra geresni. Naujuose FET servo įrenginiuose daugiausia naudojamas FET (lauko efekto tranzistorius), kurio pranašumas yra mažas vidinis pasipriešinimas ir dėl to mažesnis srovės praradimas nei įprasti tranzistoriai.
IV. Servo veikimo principas
Nuo pwm bangos į vidinę grandinę generuoja poslinkio įtampą, kontaktoriaus generatorius per reduktorių nukreipia potenciometrą judėti taip, kad kai įtampos skirtumas yra lygus nuliui, variklis sustotų, kad būtų pasiektas servo efektas.
Servo PWM protokolai yra vienodi, tačiau naujausi servo įrenginiai gali skirtis.
Protokolas paprastai yra toks: aukšto lygio plotis 0,5 ms ~ 2,5 ms, kad būtų galima valdyti servo pasukimą skirtingais kampais.
V. Kaip veikia servo varikliai
Žemiau esančiame paveikslėlyje parodyta servovariklio valdymo grandinė, pagaminta naudojant galios operacinį stiprintuvą LM675, o variklis yra nuolatinės srovės servovariklis. Kaip matyti iš paveikslo, galios operacinis stiprintuvas LM675 tiekiamas 15 V, o 15 V įtampa pridedama prie operacinio stiprintuvo LM675 fazės įėjimo per RP 1, o LM675 išėjimo įtampa pridedama prie servo variklio įvesties. Variklyje yra greičio matavimo signalo generatorius, skirtas variklio sūkių aptikimui realiu laiku. Tiesą sakant, greičio signalo generatorius yra tam tikras generatorius, o jo išėjimo įtampa yra proporcinga sukimosi greičiui. Įtampa iš greičio matavimo signalų generatoriaus G grąžinama atgal į operacinio stiprintuvo invertuojamąjį įėjimą kaip greičio paklaidos signalas po įtampos daliklio grandinės. Įtampos reikšmė, nustatyta greičio komandos potenciometru RP1, pridedama prie operacinio stiprintuvo fazės įėjimo, padalijus įtampą iš R1.R2, kuri yra lygi etaloninei įtampai.
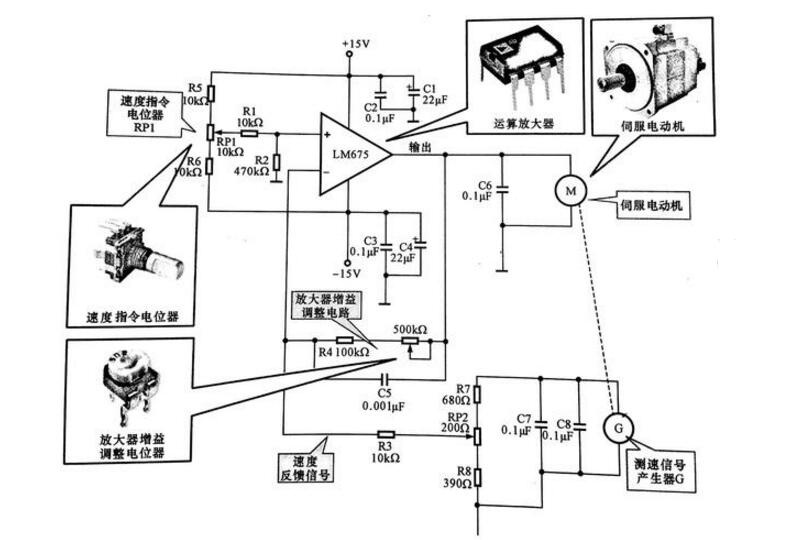
Servo variklio valdymo schema
Servovariklis: servovariklis žymimas raide M, tai yra pavaros sistemos maitinimo šaltinis. Veikimo stiprintuvas: žymimas grandinės pavadinimu, ty LM675, yra stiprintuvo dalis servo valdymo grandinėje, kuri tiekia servo variklio pavaros srovę.
Greičio komandos potenciometras RP1: nustato grandinės operacinio stiprintuvo etaloninę įtampą, t.y. greičio nustatymą. Stiprintuvo stiprinimo reguliavimo potenciometras RP2: naudojamas grandinėje, norint tiksliai sureguliuoti stiprintuvo stiprinimą ir grįžtamojo greičio grįžtamojo signalo dydį.
Keičiantis variklio apkrovai, keičiasi ir į operacinio stiprintuvo apverstą įvestį grąžinama įtampa, t.y., padidinus variklio apkrovą, mažėja greitis, taip pat mažėja greičio signalo generatoriaus išėjimo įtampa, todėl įtampa prie operacinio stiprintuvo apverstos įvesties mažėja, padidėja etaloninė išėjimo įtampa ir skirtumas tarp šios išėjimo įtampos. stiprintuvas didėja. Ir atvirkščiai, mažėjant apkrovai ir didėjant variklio sukimosi dažniui, pakyla greičio matavimo signalų generatoriaus išėjimo įtampa, didėja grįžtamojo ryšio įtampa, pridedama prie operacinio stiprintuvo invertuoto įėjimo, mažėja skirtumas tarp šios įtampos ir etaloninės įtampos, mažėja operacinio stiprintuvo išėjimo įtampa, o variklio greitis automatiškai sumažėja esant nustatytam sukimosi greičiui.


